










 portuguêspt
portuguêspt
portuguêspt
Motor Síncrono Ímã Permanente
A principal diferença entre um motor síncrono de ímã permanente (PMSM) e um motor de indução está no Rotor. estudos 1. mostre que o PMSM tem A. eficiência de aproximadamente 2% mais do que um altamente eficiente (IE3) motor elétrico de indução, desde que o estator tenha o mesmo design, e o mesmo unidade de frequência variável. é usado para controle. Neste caso, motores elétricos síncronos de ímã permanente em comparação com outros motores elétricos têm o melhor desempenho: poder / volume, torque / inércia, etc.
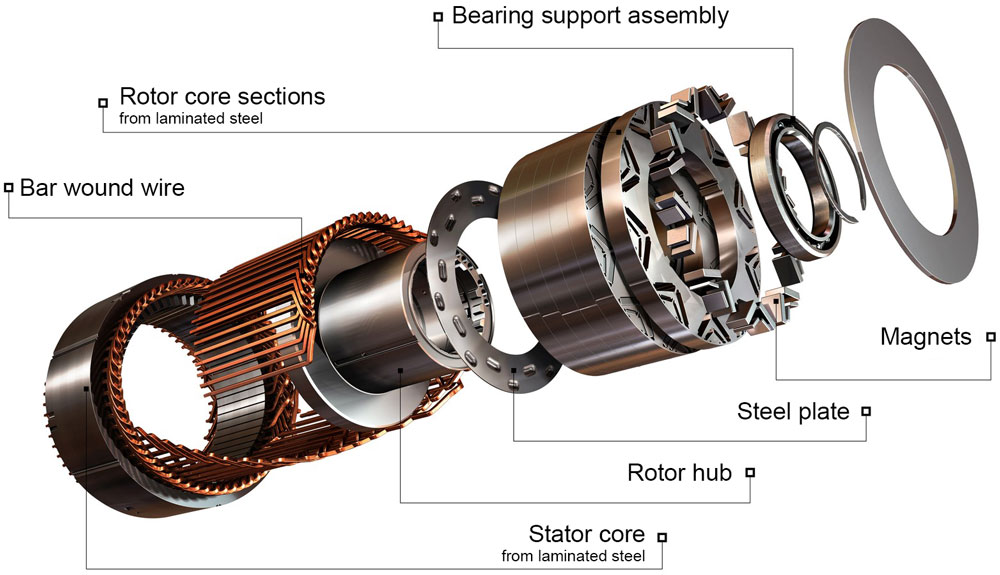
um motor síncrono de ímã permanente, como qualquer Motor elétrico rotativo, consiste em um rotor e um estator O estator é o fixo parte. O rotor é a rotação parte.
Normalmente, o rotor está localizado dentro do estator do motor elétrico, há também estruturas com rotor externo - de dentro para fora elétrico Motores.
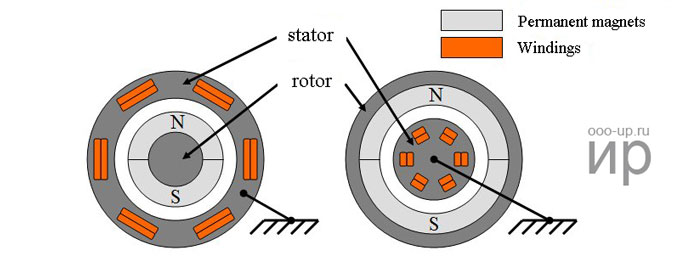
O rotorconsiste em ímãs permanentes. Materiais com alta força coerciva são usados como permanentes ímãs.
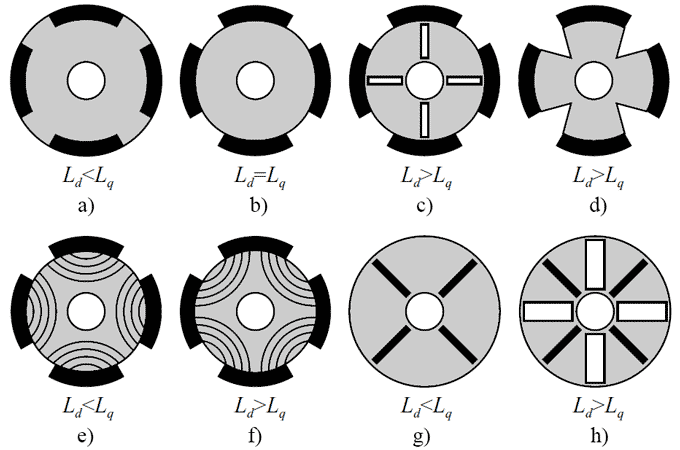
um motor elétrico com não-saliente Rotor do pólo tem uma indutância igual e de quadratura direta l D. = eu Q. , Considerando que Para um motor elétrico com rotor de pólo saliente, a indutância da quadratura não é igual ao l Q. ≠ eu D.
O estatorconsiste em uma estrutura externa e um núcleo com enrolamentos. O design mais comum com dois- e trifásica Enrolamento.
distribuídoChame tal enrolamento, em que o número de slots por Pólo e fase Q = 2, 3, ...., k.
concentrado chamado tal enrolamento, em que o número de slots por Pólo e fase Q = 1. Neste caso, os slots são uniformemente espaçados pela circunferência do estator As duas bobinas que formam o enrolamento podem ser conectadas em série e em paralelo. A principal desvantagem de tais enrolamentos é a impossibilidade de influenciar na forma da curva EMF [2]
A forma da curva EMF no condutor é determinada pela curva de distribuição da indução magnética na lacuna ao redor do estator circunferência.
Sabe-se que a indução magnética na lacuna sob o pólo saliente do rotor tem uma forma trapezoidal. O EMF induzido no condutor tem a mesma forma Se É necessário criar um EMF sinusoidal, então as pontas dos pólos recebem tal forma que a curva de distribuição de indução estar perto de Sinusoidal. Isso é facilitado pelos chanfros das pontas do pólo do rotor [2]
O princípio de operação de um motor síncrono baseia-se na interação do campo magnético rotativo do estator e do campo magnético constante do Rotor. O Conceito do campo magnético rotativo do estator de um motor síncrono é o mesmo que o de um trifásica motor de indução
O princípio da operação de um motor síncrono é baseado na interação do campo magnético rotativodo estator e o campo magnético constante do Rotor.
O campo magnético do rotor, interagindo com a corrente alternada síncrona dos enrolamentos do estator, de acordo com o ampere Lei, cria torque, forçando o rotor a rodar ( mais ).
Ímãs Permanentes localizados no rotor do PMSM Crie um campo magnético constante. Em uma velocidade síncrona de rotação do rotor com o campo do estator, os pólos do rotor intertravam com o campo magnético rotativo do estator. A este respeito, o PMSM não pode começar em si quando Está conectado diretamente à Três fase Rede atual (corrente Freqüência na rede elétrica 50Hz).
Um motor síncrono de ímã permanente requer um sistema de controle, por exemplo, unidade de frequência variável.ou um servo Drive. Há um grande número de técnicas de controle implementadas de controle sistemas. A escolha do método de controle ideal depende principalmente da tarefa que é colocada na frente da unidade elétrica. Os principais métodos para controlar um imã permanente motor síncrono são mostrados na tabela abaixo.
| ao controle | Vantagens. | Desvantagens. | |||
|---|---|---|---|---|---|
| escalar | Esquema de controle simples. | O controle não é ideal, não é adequado para tarefas Onde A carga variável, a perda de controle é possível | |||
| Com sensor de posição | configuração suave e precisa da posição do rotor e velocidade de rotação do motor, grande faixa de controle | requer sensor de posição do rotor e poderoso microcontrolador dentro do sistema de controle | |||
| Sem sensor de posição | Nenhum sensor de posição do rotor Obrigatório. configuração suave e precisa da posição do rotor e velocidade de rotação do motor, grande faixa de controle, mas menos do que com sensor de posição | Sensorless Controle orientado para o campo sobre faixa de velocidade total é possível apenas para PMSM Com o rotor saliente de pólo, um poderoso sistema de controle é necessário | |||
| Controle de torque direto | Circuito de controle simples, bom desempenho dinâmico, ampla faixa de controle, nenhum sensor de posição do rotor necessário | torque alto e ondulação atual | |||
| loop aberto. | Esquema de controle simples. | O controle não é ideal, não é adequado para tarefas Onde A carga variável, a perda de controle é possível | |||
| Com sensor de posição (Hall Sensores) | Esquema de controle simples. | sensores de salão necessários. Há torque ondulações. destina-se ao controlo da PMSM com EMF trapezoidal, quando Controlando PMSM Com EMF de volta sinusoidal, o torque médio é menor por 5%. | |||
| Sem sensor | Sistema de controle mais poderoso requerido | Não é adequado para baixa velocidade operação. Há torque ondulações. destina-se ao controlo da PMSM com EMF trapezoidal, quando Controlando PMSM Com EMF de volta sinusoidal, o torque médio é menor por 5%. | |||
Para .. Resolver tarefas simples é geralmente usado controle trapezoidal com sensores de hall (para Exemplo, computador fãs). Para .. Resolva problemas que exigem desempenho máximo da unidade elétrica, orientado para o campo O controle é geralmente selecionado.
Um dos métodos mais simples de controle de um motor síncrono de ímã permanente é - trapezoidal controle. O controle trapezoidal é usado para controlar o PMSM com back trapezoidal EMF. Ao mesmo tempo, este método também permite controlar o PMSM com um EMF de volta sinusoidal, mas o torque médio da movimentação elétrica será menor em 5%, e as ondulações de torque serão 14% do máximo valor. Há um controle trapezoidal sem feedback e com feedback pelo rotor posição.
O Controle de loop aberto (Sem Feedback) não é ótimo e pode levar à liberação do PMSM fora do sincronismo, isto é a perda de Contrability.
Como um sensor de posição do rotor para Três fase Controle trapezoidal, três sensores de salão embutidos em um motor elétrico são comumente usados, que permitem determinar o ângulo com uma precisão de ± 30 graus. Com este controle, o vetor atual do estator leva apenas seis posições por um período elétrico, como resultado da qual há torque ondulado na saída

Orientado para o campo Controle (FOC) permite-lhe suavemente, com precisão e independentemente a velocidade e torquede um sem escova motor. Para .. A operação do algoritmo de controle orientada para o campo, é necessário conhecer a posição do rotor da sem escova motor.

Desde a década de 1970 Sensorless Métodos de controle de vetor para sem escova AC. Motorescomeçou a ser desenvolvido, graças ao rápido desenvolvimento de microprocessadores. O primeiro Sensorless Os métodos para estimar o ângulo foram baseados na propriedade do motor elétrico para gerar back emf durante Rotação. O FEB de volta do motor contém informações sobre a posição do rotor, portanto, calculando o valor da EMF traseira no sistema de coordenadas estacionárias, você pode calcular a posição do rotor. mas quando O rotor não é girando, a EMF traseira está ausente e, a baixa velocidade, o EMF de trás tem uma pequena amplitude, o que é difícil distinguir do ruído, portanto esse método não é adequado para determinar a posição do rotor motor a baixa .

Atualmente, sem sensores Orientado para o campo Controle de PMSM Na faixa de velocidade total é possível apenas para motores com pólo saliente rotor.
Para ..Inquéritos sobre nossos produtos ou pricelista, por favor, deixe para nós e entraremos em contato dentro de 24 Horas.





 Chamada na :
Chamada na :
Telefone : +8613860661520
 Envia-nos um email :
Envia-nos um email :
E-mail : ivy@tech-zy.com
 Endereço :
Endereço :
Floor 16 Building#3, No.136. Kuiqi Road, Mawei District, Fuzhou City, Fujian Province, China
© direito autoral: 2026 Fujian ZY Electric & Machinery Technology Co.,Ltd Todos os direitos reservados.

IPv6 rede suportada






